What to be focused?
Have you ever thought about this question? We may have given with a numerous number of data. But what should be our focus?

Statistical data has a significant potential to be misused. Its ability to highlight any statement with any authority is especially dangerous. People will go for the evidence and certain numbers of people who use it or support it. Even if it is wrong in fact, they will claim it to be true. But while incorrect decisions based on misleading data and statistics do a great job, data also has the potential to allow deep insights, drive better decisions, and enable predictions to be made.
But why?
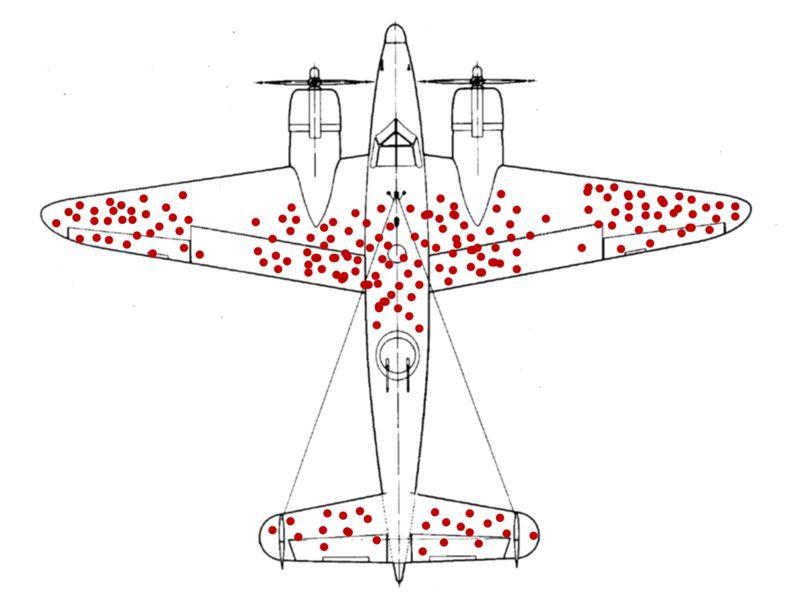
During World War II, the Allied nations' experts mapped bullet holes in fighter planes that were hit by Axis's bullets. They found a pattern and proposed a plan to reinforce the area which was severely hit by the bullets (red dots in the picture).
Theoretically, it was a logical deduction because they were the most affected areas in their flights.
But Abraham Wald, a Hungarian Jewish mathematician, came to a different conclusion. He said that the red dots represented only the damage that happened to the planes which did not affect their flight back to the home runway.
According to him the areas where there were no points should be reinforced because these are the positions where the plane would not survive being hit.
“Gentlemen, you need to put more armour-plate where the holes aren’t, because that’s where the holes were on the planes that didn’t return.” — Abraham Wald
This phenomenon is well known as survival deviation.
If you look at the ones that have survived, this happens when you should dwell on the things that haven't.
What are you looking at in this crisis? Where are you taking bullets or where should we act?
This way of dealing things may help you to see the world in the correct way and to deal with a lot of the unresolved problems. We dramatically reduce the risk of being trapped by knowing some of the most common processes where misleading data and statistics are generated. We actively contribute to a better informed world with the correct implementation of data & statistics in a responsible, understandable and ethical way.
Doesn't that sound like an awesome task for the future?
Hope it can help. Share your thoughts too.



Comments
Post a Comment